LLMForEverybody
大模型分布式训练并行技术(二)数据并行
引言
数据并行(Data Parallelism)是一种常见的并行计算策略,它通过将大数据集分割成多个小批次(batches)或子集,然后在多个GPU上同时进行模型的训练。在LLM训练中,数据并行能够有效地加快模型训练的速度。
DP & DDP
DP (Data Parallel) :(狭义的)数据并行DP是最简单的并行策略了,它是将模型的副本分布到单机多卡上,每个卡都有一个模型副本,然后每个卡都会处理不同的数据子集。在每个训练步骤结束时,所有卡都会同步模型参数。
DDP (Distributed Data Parallel) 随着数据量的增大,单机多卡的训练效率会变得很低,这时候就需要使用分布式数据并行DDP。DDP是将模型的副本分布到多台机器上,每台机器上有多个卡,每个卡都有一个模型副本。在每个训练步骤结束时,所有卡都会同步模型参数。
ZeRO Data Parallel
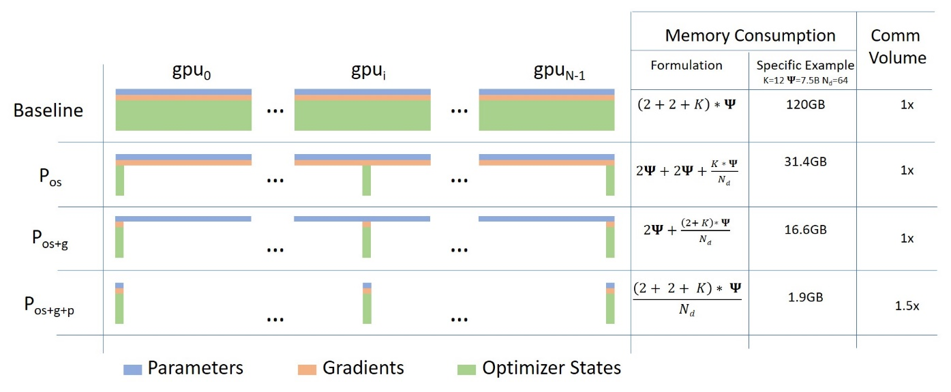
ZeRO,全称为”Zero Redundancy Optimizer”,是由微软研究院提出的一种用于优化分布式训练的内存管理技术。它旨在解决在大规模分布式训练中遇到的内存瓶颈问题,特别是在训练大型深度学习模型时。ZeRO 通过减少冗余数据来优化内存使用,使得在有限的硬件资源下训练更大的模型成为可能。
你可能也听过FSDP(Fully Sharded Data Parallel), 你可以把ZeRO Data Parallel和FSDP看作是一种相似的技术,它们都是通过将模型参数分片到多个设备上来实现数据并行的。
ZeRO Data Parallel的原理
ZeRO Data Parallel原理理解起来并不复杂,我这边引用一下Huggingface的官方文档[1]中的解释。
考虑这个具有 3 层的简单模型,其中每层有 3 个参数:
| La | Lb | Lc |
|---|---|---|
| a0 | b0 | c0 |
| a1 | b1 | c1 |
| a2 | b2 | c2 |
La 层具有权重 a0、a1 和 a2。
如果我们有 3 个 GPU,则分片 DDP(= Zero-DP)会将模型拆分到 3 个 GPU 上,如下所示:
GPU0: La | Lb | Lc —|—-|— a0 | b0 | c0
GPU1: La | Lb | Lc —|—-|— a1 | b1 | c1
GPU2: La | Lb | Lc —|—-|— a2 | b2 | c2
现在,每个 GPU 都将获得在 DP 中工作的常规小批量:
```Plain Text x0 => GPU0 x1 => GPU1 x2 => GPU2
输入未经修改 - 它们(输入)认为它们将被正常模型处理。
首先,输入到达 La 层。
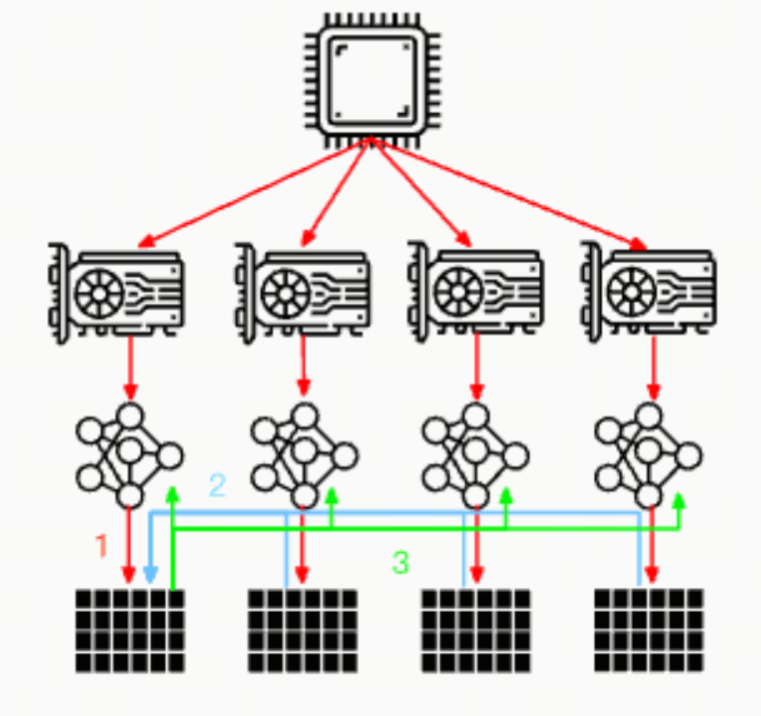
让我们只关注 GPU0:x0 需要 a0、a1、a2 参数来完成其前向路径,但 GPU0 只有 a0 - 它从GPU1 拿到 a1,从 GPU2 拿到 a2,将模型的所有部分组合在一起。
同时,GPU1 获得小批量(mini-batch) x1,它只有 a1,但需要 a0 和 a2 参数,因此它从 GPU0 和 GPU2 获取这些参数。
获得输入 x2 的 GPU2 也是如此。它从 GPU0 和 GPU1 获取 a0 和 a1,并使用其 a2 重建完整张量。
所有 3 个 GPU 都重建了完整张量,并进行前向传播。
一旦计算完成,不再需要的数据就会被丢弃 - 它仅在计算期间使用。重建是通过pre-fetch高效完成的。
整个过程先对 Lb 层重复,然后对 Lc 层向前重复,再对 Lc 层向后重复,然后向后 Lc -> Lb -> La。
## 更直观的解释
公司组织团建露营3天,大家都分别背上点东西:
```Plain Text
A扛帐篷
B扛零食
C扛水
现在,他们每天晚上都会与他人分享自己拥有的东西,并从他人那里获得自己没有的东西,早上收拾好分配给他们的装备,继续上路。这就是Sharded DDP/ZeRO DP。
将这种策略与简单的策略进行比较,简单的策略是每个人都必须携带自己的帐篷、零食和水,这会低效得多。简单策略就是DataParallel (DP 和 DDP)。
下一篇,我们看看流水线并行。
参考
[2] ZeRO: Memory Optimizations Toward Training Trillion Parameter Models
欢迎关注我的GitHub和微信公众号,来不及解释了,快上船!
仓库上有原始的Markdown文件,完全开源,欢迎大家Star和Fork!